株式会社プロキシマテクノロジー Proxima Technology Inc..
MagnetCollage 機能お役立ち編 | 山下商事株式会社.
屋内環境 SLAM のための点群グループ化による ICP 性能向上 Performance Improvement of ICP by Grouping Point C.
でべ on Twitter: "勝ち申した 回転&移動行列を得た! 前ツイに比べ キーボードやPLEN ボディがフィッティングしてるのがわかる Open3D / Python 効率やべぇ 短時間で ICP点群マッチング体験コースが終わった からあげ先生の Open3D + Python + ROS スクリプトも使えば ....
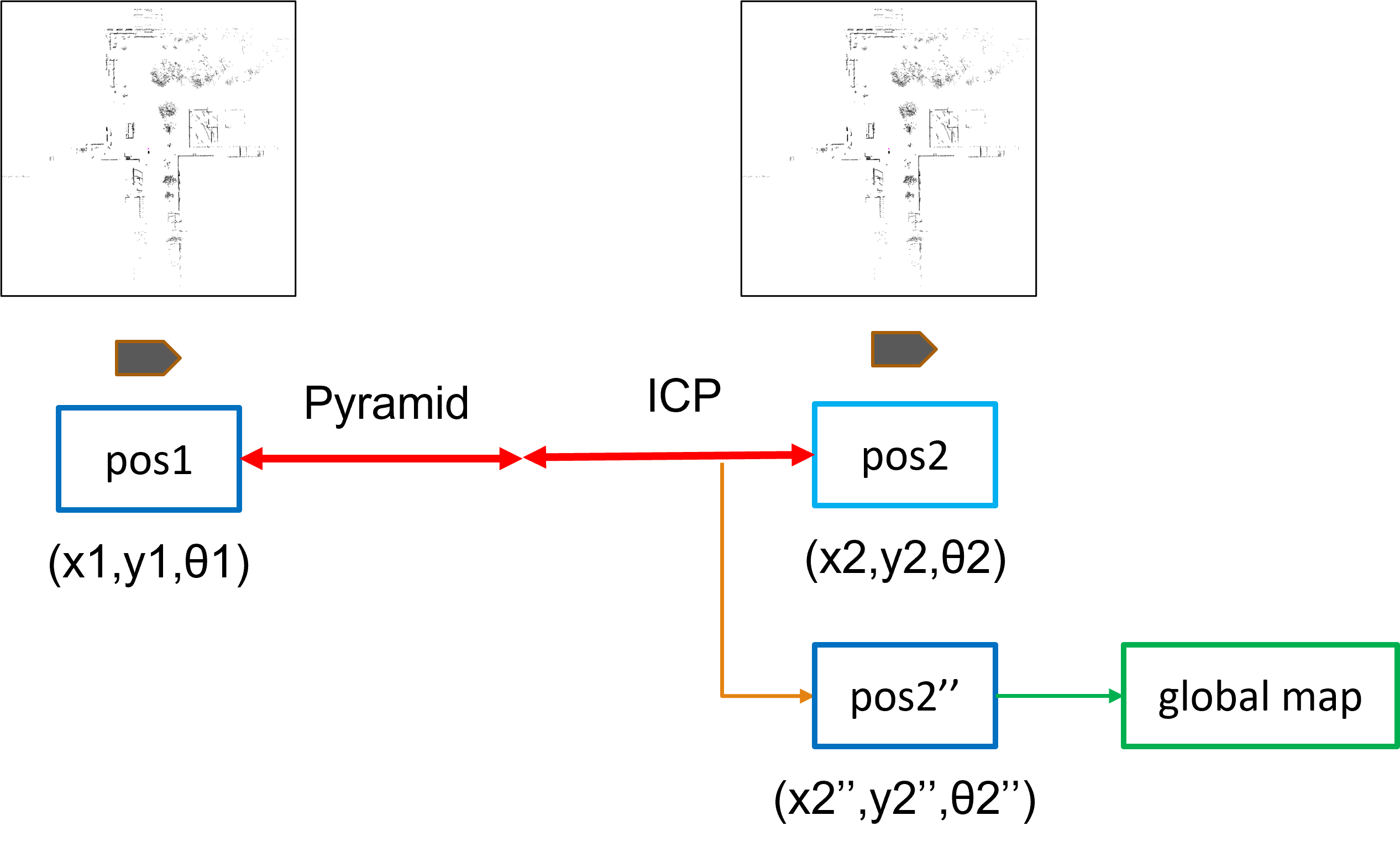
ICPマッチングを使用した高精度点群地図生成手法の開発 - OhtaLabWiki.
LiDAR点群とSfM点群との位置合わせ | PPT.
点群処理をライブラリを使って実装する - Thoth Children.
論文100本ノックの27】RANSAC による屋内環境レーザ計測点群の BIM 構成要素への効率的なマッチングと差分点抽出 - PCLで点群処理.
SHOT特徴量を用いた 3Dモザイキング に基づく三次元復元.
ロボットのための 3次元物体認識研究の現状と展望.
3Dライブラリソフトウェア|画像処理ソリューションのリーディングカンパニー / マイクロ・テクニカ.
測定点群を用いた建造物モデリングのための 特徴線抽出法と特徴線マッチング法.
Python】Open3DでICPを実装して位置合わせ(レジストレーション) - J's Deliberate Learning.
書籍「SLAM入門」の読書録~スキャンデータの前処理~ - EurekaMoments.
3次元データ処理の基本 ~3次元点群の「生成」「位置合わせ」を実現する技術の概要 - アイマガジン|i Magazine|IS magazine.
分子の点群を帰属する | Chem-Station (ケムステ).
UAVによる計測も!点群データが 設計・施工で身近に(4ページ目) | 日経クロステック(xTECH).
Metashapeのアラインメントパラメータの使い方と処理速度への影響 | SKラボ.net.
よくある質問と回答 | Collage Site 1.4.5 ナレッジベース.
ICPマッチングを使用した高精度点群地図生成手法の開発 - OhtaLabWiki.
3次元RGBヒストグラム点群マッチングによる自動色補正」スライド Automatic Color Correction by 3D RGB Histogram Point Cloud Matching Slide.
3次元モデルマッチング - 実績事例紹介 | アプライド・ビジョン・システムズ.
読書メモ】詳解 3次元点群処理 Pythonによる基礎アルゴリズムの実装.
DataLabs、点群・三次元モデルをベースとしたクラウド型コミュニケーションツールの提供を開始|DataLabs株式会社のプレスリリース.
PatchMatchで画像マッチング&点群の位置合わせ - Qiita.
最適化 | Collage Site 1.4.5 ナレッジベース.
PatchMatchで画像マッチング&点群の位置合わせ - Qiita.
橋のデジタルツインを構築して点検を効率化 3Dモデルに画像をマッチングする技術: NECの最先端技術| NEC.
PatchMatchで画像マッチング&点群の位置合わせ - Qiita.
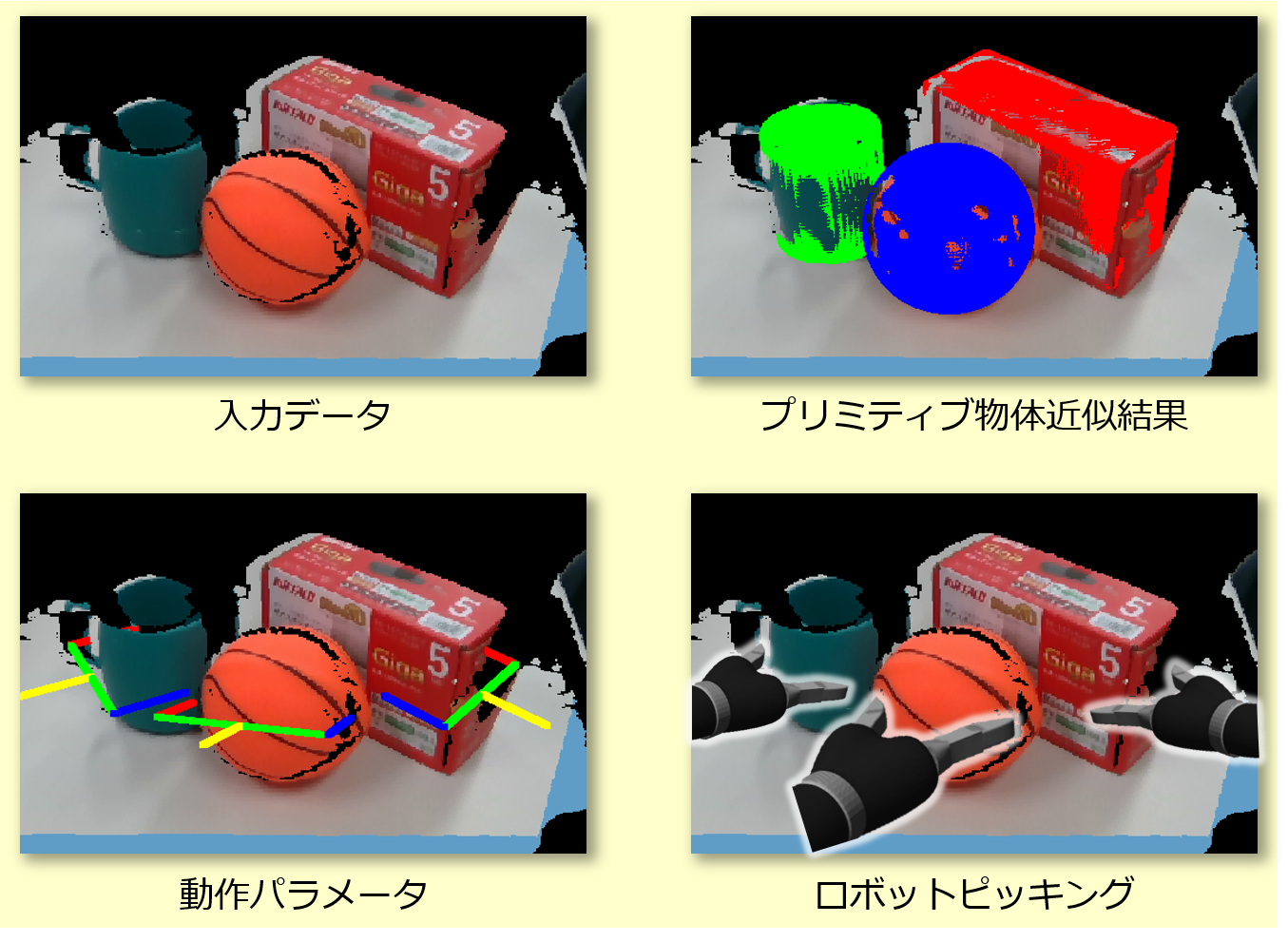
ばら積みロボットピッキングが可能に! 透明部品も読み取る3次元ビジョンセンサー:NEDOロボットベンチャーショー - MONOist.
3次元ロボットピッキングシステム | スマートファクトリー事業・FAプロダクツ.
ICPマッチングを使用した高精度点群地図生成手法の開発 - OhtaLabWiki.
ウェブサイトでの他の画像素材:
点群 画像 マッチング








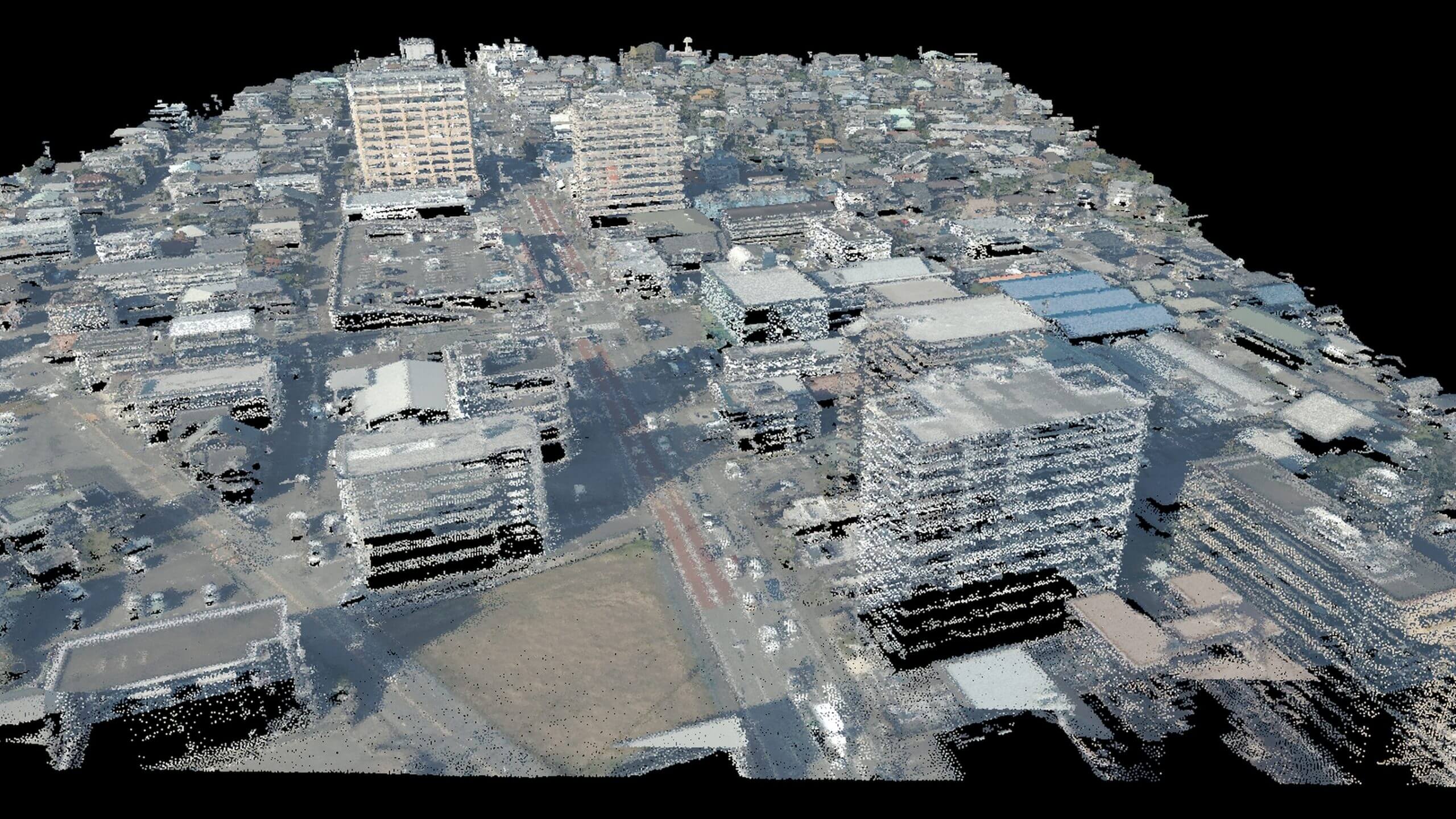
![3D都市モデルを基礎としたIDマッチング基盤 | Use Case | PLATEAU [プラトー]](https://firstkut.co.in/img/---9.png)